Desarrollan un robot inspirado en las medusas que agarra los objetos con tentáculos
Los investigadores de la Escuela de Ingeniería y Ciencias Aplicadas John A. Paulson de Harvard, fueron los precursores y los encargados de poner a prueba dicha creación
Los investigadores de la Escuela de Ingeniería y Ciencias Aplicadas John A. Paulson de Harvard, fueron los precursores y los encargados de poner a prueba dicha creación
Actualmente en diversas industrias que implementan estas tecnologías no se ha desarrollado uno capaz de agarrar con precisión objetos frágiles, por ello los expertos crearon esta mano robótica que usa, una colección de tentáculos delgados para enredar y atrapar objetos, de forma similar a como las medusas atrapan presas aturdidas. De acuerdo a la investigación, los tentáculos individuales, o filamentos, son débiles. Pero juntos, la colección de filamentos puede agarrar y sujetar con seguridad objetos pesados y de formas extrañas. La pinza se basa en un simple inflado para envolver objetos y no requiere detección, planificación o control de retroalimentación.
“Con esta investigación, queríamos volver a imaginar cómo interactuamos con los objetos”, señaló Kaitlyn Becker, exestudiante de posgrado y becaria postdoctoral en SEAS y primera autora del artículo. “Al aprovechar el cumplimiento natural de la robótica blanda y mejorarlo con una estructura compatible, diseñamos una pinza que es más grande que la suma de sus partes y una estrategia de agarre que puede adaptarse a una variedad de objetos complejos con una planificación y percepción mínimas".
Los filamentos cuentan con cerca de 30.48 cm de largo y son tubos de goma huecos. “Un lado del tubo tiene una goma más gruesa que el otro, por lo que cuando el tubo está presurizado, se riza como una coleta o como un cabello alisado en un día lluvioso” señalan.
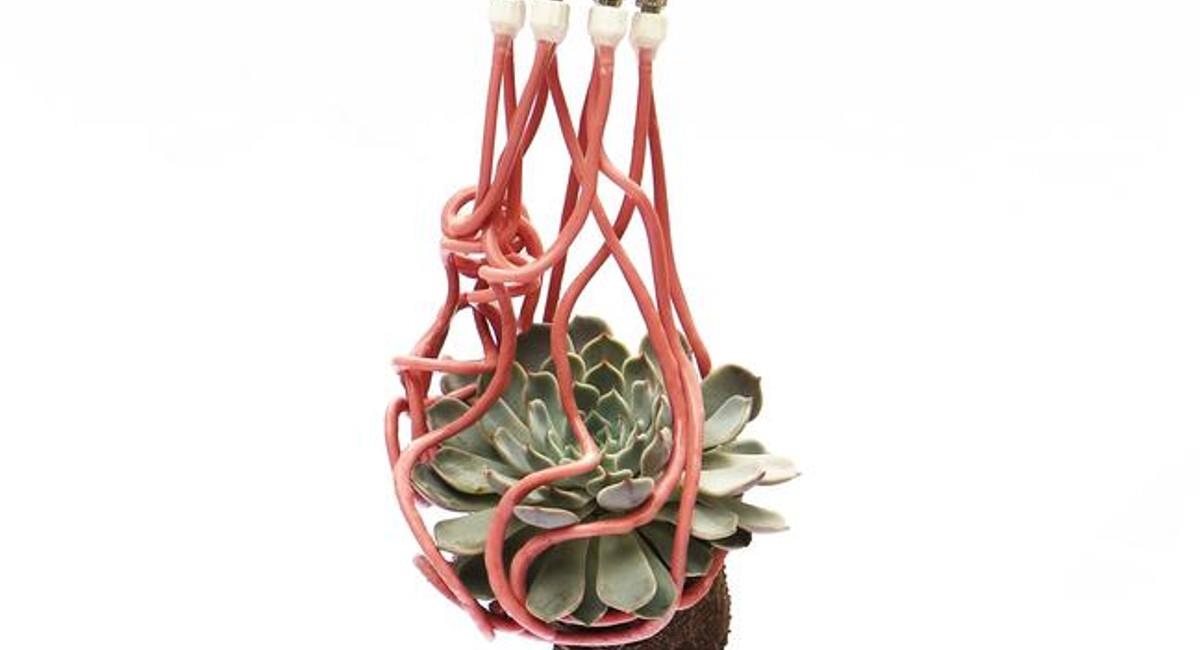
El robot fue puesto a prueba en diversos contextos, recogiendo una variedad de objetos, incluidas varias plantas de interior y juguetes. En cuanto a su implementación a la vida real, se explica que la pinza podría usarse para sujetar frutas y verduras blandas para la producción y distribución agrícola, tejidos delicados en entornos médicos, incluso objetos de forma irregular en almacenes, como cristalería.
Mahadevan, profesor de Matemáticas Aplicadas de Lola England de Valpine en SEAS, and of Organismic and Evolutionary Biology, and Physics in FAS y coautor correspondiente del artículo, aseveró "El entrelazamiento permite que cada filamento altamente compatible se ajuste localmente a un objeto objetivo, lo que conduce a un agarre topológico seguro pero suave que es relativamente independiente de los detalles de la naturaleza del contacto".
Este avance se muestra como un gran potencial de la robótica y es prueba de que el avance de la tecnología y la Inteligencia Artificial fusionadas, tienen buenos resultados para ayudar en tareas que parecen simples, pero requieren mayor complejidad.
Artículos Relacionados

Científicos desarrollan bota de exoesqueleto

Así es la impresionante nueva mano biónica de una nadadora paralímpica
